
 ВњЦЗ:133
ВњЦЗ:133

ПЕФЭЪгжЧФмЯрЛњЪгОѕв§ЕМММЪѕКЭАВДЈЛњЦїШЫЕФхтхЫ
“ЖдЛњЦїШЫНјааБрГЬвдДгДЌдЫМЏзАЯфЛђРЌЛјЯфжаЫцЛњЬєбЁШЁЯђЕФСуМўШдШЛЪЧОпЬєеНадЕФздЖЏЛЏШЮЮёжЎвЛЃЌашвЊЙуЗКЕФЙЄГЬжЊЪЖКЭИДдгЕФЯЕЭГЩшМЦЁЃгЩгкЕБНёОпгаГЩБОаЇвцЕФжЧФмЯрЛњЕФЙІФмВЛЖЯдіЧПЃЌЪьСЗЕФздЖЏЛЏМЏГЩЩЬе§дкВЛЖЯХЌСІЁЃФмЙЛБШвдЭљИќПьЃЌИќОпГЩБОаЇвцЕиНтОіМ№бЁгІгУГЬађЃЌвђДЫжЦдьЩЬЯждкФмЙЛБШвдЭљздЖЏЛЏИќЖрЕФзщзАгІгУГЬађЃЌВЂЛёЕУаТЕФжмЦкЪБМфМЧТМЃЌЭЌЪББмУтСЫжиаТзщзАКЭзЈгУдЫЪфМЏзАЯфЕФЖюЭтГЩБО”ЃЌЙЋЫОЗЂбдШЫЫЕЁЃ
ЦћГЕПЭЛЇЯжгаЕФаЁХњСПЩњВњЯпашвЊЖрДяЫФИіЬхСІРЭЖЏепВХФмНЋЭъећЕФСЯЖЗДгНјСЯЛњЪфЫЭЛњзЊвЦЕНзАХфЬЈЃЌДгЫЩЩЂВМжУЕФСЯЖЗжаЬєбЁУПИіжДааЦїЃЌВЂВ№ЯТСЯЖЗФкЕФИєАхвдЕНДяЯТвЛВу*жеНЋУПИіжДааЦїЗХШызЈУХЕФГВжаЃЌвдБужегУН№ЪєЫПЕцНјаазщзАЁЃжЦзїУПИіСуМўДѓдМашвЊ90УыжгЃЌетжївЊЪЧвђЮЊФбвдВйзїЗцРћЕФЃЌШсШэЕФН№ЪєЫПЕцЁЃЫфШЛетдквЛЖЮЪБМфФкЪЧПЩвдНгЪмЕФЃЌЕЋИќИпЕФЪ§СПашвЊвЛжжздЖЏЛЏЕФНтОіЗНАИЁЃ
SYSTEMATIXПЊЗЂСЫНєДеЕФVGRНтОіЗНАИЁЃSYSTEMATIXЪЙгУРыЩЂОрРыВтСПДЋИаЦїЃЌдкДЙжБЛЌПщЩЯАВзАСЫОпгаPatMax RedLineФЃЪНЫбЫїЙІФмЕФCognex In-Sight 8000ГЌНєДеаЭЪгОѕЯЕЭГКЭ6жсЛњЦїШЫЃЌПЩдкМѕЩйжмЦкЪБМфКЭМѕЩйЛњЦїЩњВњЕФЭЌЪБЬсИпПЭЛЇЕФЩњВњОЋЖШашЧѓЁЃSYSTEMATIXЯњЪлзмМрRob VeldhuisБэЪОЃК“гыММЪѕЙЉгІЩЬЃЈР§ШчЃЌПЕФЭЪгЃЉЕФКЯзїЪЙЮвУЧФмЙЛЮЊПЭЛЇЬсЙЉЕФздЖЏЛЏНтОіЗНАИЁЃ”
НтОіЗЧНсЙЙЛЏРЌЛјЯфМ№Лѕ
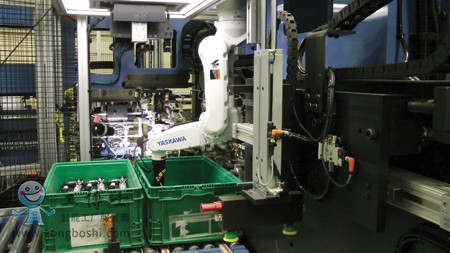
ЭъећЕФЙЄзїЕЅдЊРћгУ7ИіYaskawaЛњЦїШЫДгИїздЕФдЫЪфШнЦїжаШЁГіСЫжДааЦїКЭН№ЪєЫПЕцЃЌНЋСуМўЗХЕНГВжаВЂНјаа Ыљга*жезщзАСЌНгЁЃЩшМЦДЫЙЄзїЕЅдЊЪБУцСйЕФжївЊЬєеНжЎвЛЪЧШчКЮЖдЛњЦїШЫНјааБрГЬЃЌвдЪЙЦфФмЙЛвдИпОЋЖШКЭЫйЖШПЩППЕиЪАШЁЫцЛњЖЉЙКЕФСуМўЃЌДгЖјТњзуаТЕФЙЄзїЕЅдЊжмЦкЪБМфЃЈУПИізщМўЮхУыжгЃЉЖјВЛБижиаТЩшМЦдЫЪфМЏзАЯфЕФвЊЧѓЃЌетЛсдіМгГЩБОВЂгАЯьЦфЫћЩњВњВНжшЁЃ
дкећИіЩњВњЩшЪЉжаЪЙгУЕФЯжгаШнЦїАќРЈВЈЮЦзДИєАхЃЌгУгкНЋжДааЦїЕФвЛВугыСэвЛВуЗжПЊЁЃОЁЙметжжОМУИпаЇЕФНтОіЗНАИдЪаэдкећИіЙЄГЇЕФЖрИіЩњВњЯпЩЯЪЙгУЭЌвЛШнЦїЃЌЕЋетвВвтЮЖзХжТЖЏЦїЮДЙЬЖЈдкСЯЯфжаЃЌетЕМжТЫќУЧдкдЫЪфЙ§ГЬжаЗЂЩњвЦЮЛЁЃНсЙћЃЌБиаыЗХжУУПИіЫцЛњЖЈЮЛЕФСуМўЃЌШЛКѓВХФмгЩЛњЦїШЫНЋЦфЪАШЁЁЃДЫЭтЃЌгЩгкУПИіРЌЛјЯфЖМгаМИВуЃЌвђДЫдкЧхПеРЌЛјЯфЪБЃЌБиаыжиаТМЦЫуДгЛњЦїШЫЕНЗжВуЦїЕФДЙжБОрРыЁЃ
ЪЙгУ3-DДЋИаЦїЕФЕфаЭЩшжУЃЈР§ШчЕЭЗжБцТЪЃЌЕЭЫйЗЩааЪБМфДЋИаЦїЃЌМЄЙтЩЈУшШ§НЧВтСПДЋИаЦїЛђвдСЂЬхЪгОѕХфжУВМжУЕФСНИіЩуЯёЭЗЃЉашвЊДѓСПЪБМфРДВЖЛёЭМЯёЃЌНЋЦфЗЂЫЭЕНЕЅЖРЕФМЦЫуЛњЛђЩшБИНјааДІРэЃЌжДааИпМЖ3-DЗжЮіЫуЗЈЃЌВЂНЋНсЙћДЋДяИјЛњЦїШЫЁЃЭЈЙ§НЋЮЪЬтМѕЩйЕНЖўЮЌСуМўЮЛжУЃЌВЂЪЙгУЙтЕчВтОрДЋИаЦїЬсЙЉЕкШ§ЮЌЃЈИпЖШЃЉаХЯЂЃЌНтОіЗНАИЪЕЯжСЫИќПьЕФбЛЗЪБМфЃЌЖјУЛгаДЋЭГЕФ3-DЛњЦїЪгОѕНтОіЗНАИЕФИДдгадКЭГЩБОЁЃ

дкЩшМЦжмЦкЕФдчЦкЃЌSYSTEMATIXЙЄГЬЪІвтЪЖЕНдкЖрИіЗНУцЪЕЯж5УыЕФжмЦкЪБМфНЋЪЧвЛИіЬєеНЁЃЛњЦїЪгОѕЯЕЭГВЛНіашвЊФмЙЛвдЫцЛњЗНЯђИпЫйЖЈЮЛСуМўВЂдкдЫЪфМЏзАЯфжаЖЈЮЛЗжИєЮяЃЌЖјЧвЩѕжССЌВжЮЛИќЛЛвВашвЊОЁПьЗЂЩњЁЃЗёЖЈДЫВпТдЕФЗНЗЈЪЧДгЕфаЭЕФРЌЛјЯфКѓУцЕФРЌЛјЯфжаМёЪАвЛМўЁЃетбљОЭЮЊПеЯфЬкГіСЫИќЖрЕФЪБМфЃЌаТЯфПЩвдЧАНјСЫЃЌЭЌЪБШдФмТњзужїЯпУПЮхУыжгЮЊзщМўзАХфаТСуМўЕФашЧѓЁЃ
ЮЊСЫНЕЕЭЛњЦїЪгОѕГЬађЕФИДдгадВЂНјвЛВНЫѕЖЬжмЦкЪБМфЃЌЭЌЪБгжЯожЦСЫГЩБОЃЌSYSTEMATIXЙЄГЬЪІНЋIFM Efector 200ЙтЕчВтОрДЋИаЦїКЭАВзАдкIAIЫХЗўЧ§ЖЏЛЌЙьЩЯЕФCognex In-Sight 8000жЧФмЯрЛњХфЖдЁЃЙтЕчДЋИаЦїВтСПЕНРЌЛјЯфЗжИєЦїЕФДЙжБОрРыЁЃвЛЕЉМЦЫуГіИУОрРыЃЌЛЌЦЌОЭЛсЯђЩЯЛђЯђЯТвЦЖЏЃЌвддкЯрЛњКЭЗжИєБэУцжЎМфБЃГжЙЬЖЈЕФОрРыЁЃДЫВйзїЮоашМЦЫу2DЩуЯёЛњдкЯфВуПеСЫВЂЧвСуМўОрРыдНРДдНдЖЪБПДЕНЕФЭМЯёБШР§ЁЃ
“ПЕФЭЪгIn-Sight 8000ЩуЯёЛњжЎЫљвдБЛбЁзїСуМўЖЈЮЛКЭЛњЦїШЫжИЕМЃЌЪЧвђЮЊЫќЕФжЧФмЩуЯёЛњНтОіЗНАИвдНєДеЕФаЮЪНЬсЙЉСЫИпЫйЭМЯёВЩМЏЃЌЭМЯёДІРэШэМўКЭЭјТчЭЈаХЙІФмЃЌ”ЙЋЫОЗЂбдШЫЁЃДЫЭтЃЌГЌНєДеаЭЛњЦїЪгОѕЯЕЭГБъХфСЫПЕФЭЪгЕФPatMax RedLineФЃЪНЫбЫїЫуЗЈ-ПЩвдНЋСуМўЖЈЮЛЫйЖШЬсИпЖрДя10БЖЁЃ
ШЮКЮЛњЦїЪгОѕгІгУГЬађЃЌЭЈГЃЪЧШЗЖЈИУгІгУГЬађЪЧГЩЙІЛЙЪЧЪЇАмЕФЃЌЖМЩцМАНЋЖдЯѓЖЈЮЛдкЪгОѕЯрЛњЕФЪгвАФкЁЃДЫЙ§ГЬГЦЮЊФЃЪНЦЅХфЁЃФЃЪНЦЅХфПЩФмМЋОпЬєеНадЃЌвђЮЊаэЖрБфСПЛсИФБфЖдЯѓдкЪгОѕЯЕЭГжаЕФЭтЙлЁЃЮЊСЫПЫЗўетаЉЯожЦЃЌПЕФЭЪгПЊЗЂСЫГЦЮЊPatMaxЕФМИКЮЭМАИЦЅХфММЪѕЁЃетЯюММЪѕЪЙгУвЛзщАѓЖЈЕНЯёЫиЭјИёЕФБпНчЧњЯпРДбЇЯАЖдЯѓЕФМИКЮаЮзДЃЌШЛКѓдкЭМЯёжабАевЯрЫЦЕФаЮзДЖјЮоашвРРЕЬиЖЈЕФЛвЖШМЖЁЃ“НсЙћЪЧдкНЧЖШЃЌДѓаЁКЭвѕгАЗЂЩњБфЛЏЕФЧщПіЯТЃЌВщевЖдЯѓЕФФмСІгаСЫИяУќадЕФИФНјЁЃ*аТЕФPatMaxЕќДњRedLineЃЌ
ЪЙгУPatMaxЃЌРЌЛјЯфМ№бЁгІгУГЬађжаЕФIn-Sight 8000ЩуЯёЛњПЩвдПьЫйДІРэСуМўЭМЯёВЂНЋЦфгыВЮПМЭМЯёНјааБШНЯЃЌДгЖјШЗЖЈЛњЦїШЫУПИіСуМўЕФЗНЯђЁЃвдЯёЫиЮЊЕЅЮЛВтСПЕФЯрЛњЭМЯёБЛзЊЛЛЮЊКСУзМЖЕФЛњЦїШЫЪАШЁзјБъЃЌЖјCognex ConnectШэМўЪЙЯрЛњФмЙЛНЋзјБъжБНгДгвЛжжЙЄвЕЩшБИДЋЕнЕНСэвЛжжЙЄвЕЩшБИЃЌЖјЮоашжаМфДІРэЁЃ
SYTEMATIXЪгОѕгыПижЦЙЄГЬЪІSteve RegierЫЕЃК“ЪЙгУПЕФЭЪгInSightЪЙЮвУЧФмЙЛПьЫйВПЪ№ПЭЛЇПЩвдРэНтКЭЮЌЛЄЕФЯЕЭГЁЃ“зїЮЊздЖЏЛЏЩшБИЕФЬсЙЉЩЬЃЌПЕФЭЪгIn-SightЮЊЮвУЧЬсЙЉСЫЧПДѓЕФФмСІКЭСщЛюадЃЌвдгІЖдПЊЗЂЖЈжЦЛњЦїЪБПЩФмЗЂЩњЕФЗЖЮЇКЭЙІФмашЧѓБфЛЏЕФБфЛЏЁЃ”
