
 产品:133
产品:133

1、先看一下安川机器人在维护模式中的一个列表:(进入维护方式大家都知道了,不解释了)管理员模式进行可以调整这些参数。

变量是一个变化的数值,在程序中经常做运算和计数,以及输入信号用来保存数据的一个参数,根据用途分为六个类别,和安川示教器上面对应,英文翻译过来就是字节型,整数型,双精度浮点型(俗称倍精度型),实数型,文字型以及位置型。如下表:
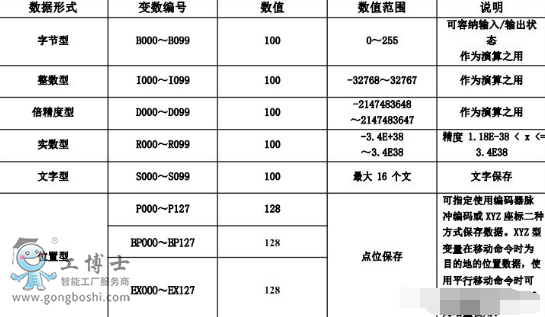
(1)字节型:数据存储是以字节为单位,数据传输大多是位为单位,一个位就代表一个0或1,每8个位组成一个字节,是***小一级的信息单位。
(2)整数型:INT是数据库中一种数据类型,常用来取一个数中的整数部分。Int是将一个数值向下取整的函数。
(3)双精度浮点型:计算机语言的一个类型,作用是表示数据的时候比较准确一些。
(4)实数型:实数型则可以定义含有小数的数,而且有效位数比整型多,***性高!
(5)文字型:String是一个奇葩。String对象不可变,也就是说当对象创建完毕之后,该对象的内容(字符序列)是不允许改变的,如果内容改变则会创建一个新的String对象,返回到原地址中。
(6)位置型:位置型变量,又称为P型变量,可以用脉冲型、或XYZ型保存坐标位置数据。BP型的位置变量通常用于基座轴,而EX型位置变量通常用于外部轴。
另外要讲的是工业机器人语言其实是一种介于汇编语言与Java之间的一种语言,可以理解为低级语言;为了计算机可以在运算逻辑上方便识别,便使用了这些数据形式进行设置。这样满足了不同方式的数据传送,在程序中得以进行逻辑判断与执行。
注:本文章文字、图片部分来自网络