
 产品:133
产品:133

安川机器人的外部IO启动运行,即通过外部信号控制机器人启动、暂停、复位、选择主程序和运行程序。
安川机器人提供自动化产品和解决方案几乎每一个行业和机器人的应用; 包括电弧焊,组装,涂覆,分配,材料处理,材料切割,材料去除,包装,码垛和点焊。
一、安川机器人机械安全端子台基板(JANCD-YFC22-E)
1、机械安全 I/O 基板(JANCD-YSF22B-E)

2、安全端子台基板接线外引
(1)机械安全端子台基板(JANCD-YFC22-E)是为了连接安全输出输入信号等专用外部信号的端子台基板。

(2)安全端子基台实物图片

3、安全段子台基板100个端口作用 JANCD-YFC22-E 连接端子表
二、安川机器人通用 I/O 基板(JANCD-YIO21-E)
1、通用IO基板插头外接
(1)电箱背板插头

(2)外接实物图

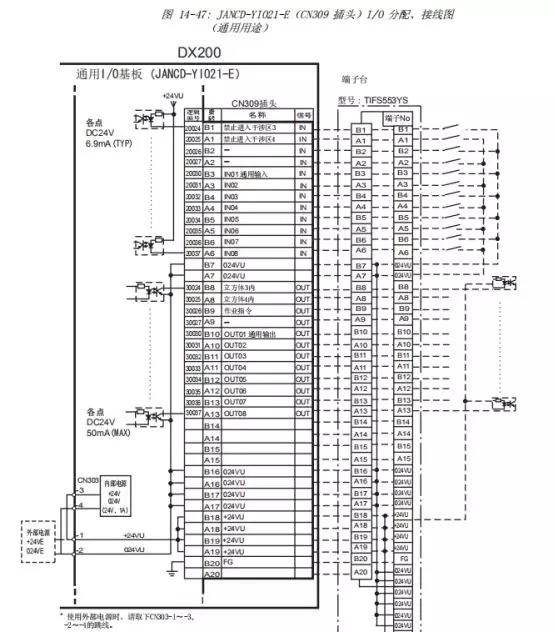
(3)机器人通用输出入连接器(CN306、307、308、309)
机器人通用输出入连接器(CN306、307、308、309)的连接制作连接在通用 I/O 基板(JANCD-YIO21-E)的输出入插头(CN306、307、308、 309)的电线时,请参考下图。电线请使用无屏蔽的双绞线。(电线一侧的插头及I/O端子台为选装件)

(4)连接器端子头

(5)外接端子实物图CN306

(6)外接端子实物图CN308

2、通用IO基板供电电源
(1)接线板端子

(2)实物接线图:用外接开关电源24V和0V

3、通用IO基板CN306图
(1)CN306接线端子图

(2)CN306实物图

4、通用IO基板CN307

5、通用IO基板CN308
(1)CN308接线端子图

(2)CN308实物图

6、通用IO基板CN309
三、安川外部启动常用的信号及其接线图
1、安全端子台基板常用IO接线图
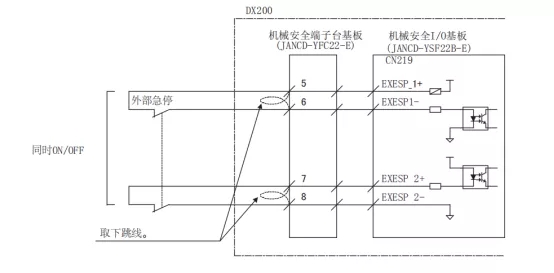
(1)外部急停接线图
外连接外部操作设备等的急停开关时使用。输入信号,关闭伺服电源,停止程序执行。信号输入时,无法接通伺服电源。由于机器人出厂时配有跳线,使用时必须先取下跳线。不取下跳线,即使输入了外部急停信号也不会起作用,会造成人身伤害或设备损坏。
(2)暂停接线图
连接外部操作设备等的暂停开关时使用。输入信号,停止程序。信号输入时将无法开始作业和进行轴操作。由于机器人出厂时配有跳线,使用时必须先取下跳线。不取下跳线,即使输入了外部急停信号也不会起作用,会造成人身伤害或设备损坏。

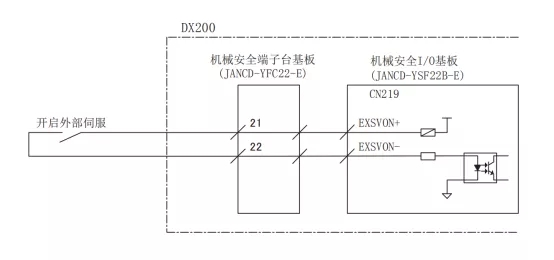
3)外部上电接线图
连接外部操作设备等的伺服开启开关时使用。输入信号,开启伺服电源。
2、通用IO基板CN308专用IO接线图

3、通用IO基板CN306和CN309接线图

四、现场接线和操作步骤
1、端子台实物接线图
(1)按钮实物接线

(2)端子台接线实物图

2、CN308专用实物接线图

3、编写程序和设定为主程序
这里使用平移指令SFTON合SFTOF,编写安川平移搬运程序,程序及其注释如下:
NOP 程序开始
*WHILE_T 无限循环标签*WHILE_T
SET B010 0 赋值B010=0
SUB P010 P010 把P010清零
*A 取料放料标签*A
MOVJ C00000 VJ=30.00 取料点上方点位
MOVL C00001 V=300.0 取料点
DOUT OT#(12) ON 机器人夹具信号
TIMER T=0.50 夹具动作延迟0.5秒
MOVL C00002 V=400.0 取料点上方点位
SFTON P010 开启平移指令:这里用机器人坐标系,平移变量以P010为准
MOVJ C00003 VJ=30.00 放料点上方点位
MOVL C00004 V=300.0 放料点位
DOUT OT#(12) OFF 机器人夹具信号
TIMER T=0.50 夹具动作延迟0.5秒
MOVL C00005 V=400.0 取料点上方点位
SFTOF 关闭平移指令
MOVJ C00006 VJ=30.00 取料点上方点位
ADD B010 1 计数器B010自加一
ADD P010 P011 把平移变量P010累加加上P011的偏移量
JUMP *A IF B010<4 如果B010值小于4则执行跳转指令跳转到标签*A,如果B010大于4则继续往下正常运行
WAIT IN#(15)=ON 等待循环启动信号di15
JUMP *WHILE_T 跳转到标签 *WHILE_T无限循环
END 程序结束
4、操作步骤
(1)启动过程
A:安川机器人设置主程序;
B:安川机器人示教器打到外部运行模式
C:按下安全基板伺服上电按钮;
D:按下CN308选择主程序按钮;
E:按下CN308启动按钮——>机器人正常运行
F:每次执行完四个产品,机器人wait di15;
(2)暂停和恢复启动
A:机器人正常运行时,按下暂停按钮,机器人立刻停止,暂停时机器人还处于上电状态;
B:直接按下启动按钮,机器人继续接着往下正常运行;
(3)急停和恢复启动
A:机器人正常运行时,按下安全基板外部急停按钮,机器人立刻停止并报外部急停信息,机器人电机断开;
B:按下CN308报警/错误复位按钮;
C:按下安全基板伺服上电按钮;
D:按下CN308启动信号,机器人接着往下继续正常运行。
工博士提供了FANUC, Yaskawa, ABB,Kawasaki和 KUKA等各种新型机器人 。我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线或致电与我们联系 。
工博士机器人技术有限公司是安川机器人的一级代理商,服务于安川机器人裸机销售、安川机器人周边设备配套、安川机器人售后技术服务支持