
 产品:133
产品:133

在上一篇文章内容中,介绍了Motocom32的安装以及实现计算机与机器人控制柜之间通讯的必要的硬件条件,包括连接以太网线、修改本地IP、Ping通、插入硬件加密狗等。以Jungle的个人经验来看,“插入硬件加密狗”是容易被忽视的问题,在以后的研发过程中,会出现“明明程序没有Bug、同样的程序明明上次都可以控制机器人,这次却不能了”的问题,源头就可能是因为没有插入硬件加密狗!(Motoman机器人离线编程——Motocom32开发简介)
虽然安装了Motocom32后可以通过自动安装的3个软件来控制安川机器人,但是我们更进一步的目标是借助Motocom32,通过coding来按需开发个人应用程序。本节Jungle以Visio Studio 2008为例,介绍在Visio Studio 2008里结合Motocom32开发程序的基本方法。
1.环境配置
说明:在自己的电脑上,Motocom32的安装位置是:E:\Motocom32
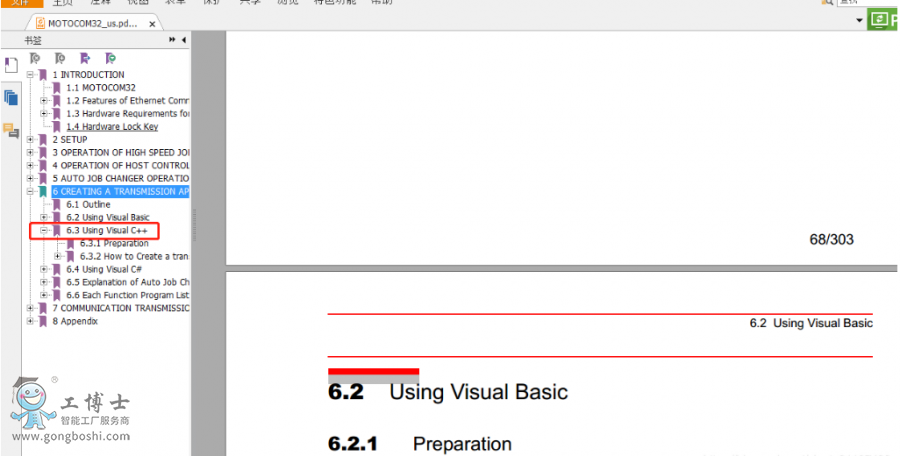
值得一提的是,在安装位置的E:\Motocom32\MOTOCOM32DLL\Help文件夹下,会有Motocom32的英文和日文帮助文档,这个文档会很有用,不论是在安装配置还是在开发过程中,这个文档都可以极好地帮助各位。当然,在后期的开发过程中,更多的不仅在于调用哪个哪个库函数,更在于整个程序的逻辑。
1.1 文件移动
首先新建一个工程,这里取名为Robot,将E:\Motocom32\MOTOCOM32DLL文件夹下的以下7个文件放到工程目录下:

1.2 环境配置
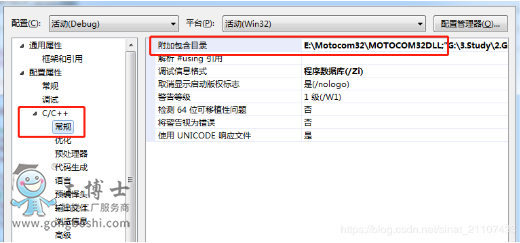
1.Debug——C/C++——常规——附加包含目录:添加E:\Motocom32\MOTOCOM32DLL
3.Debug——链接器——输入:添加MotoCom32.lib vrp32.lib
4.VC++——包含目录:添加Motocom32安装位置
5. VC++——库目录:添加Motocom32安装位置下lib路径
1.3 头文件包含
在Robot.h中包含下列头文件(主要是包含motocom.h)
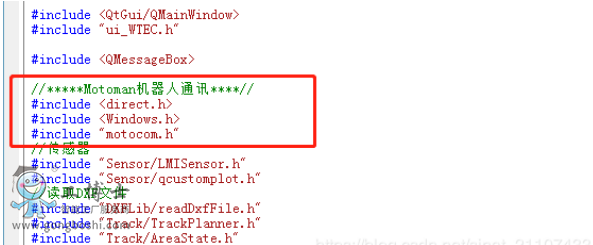
这里要包含上
至此,编译整个程序应该就没问题了。如果还出现什么问题,请以此检查上述步骤是否完成。
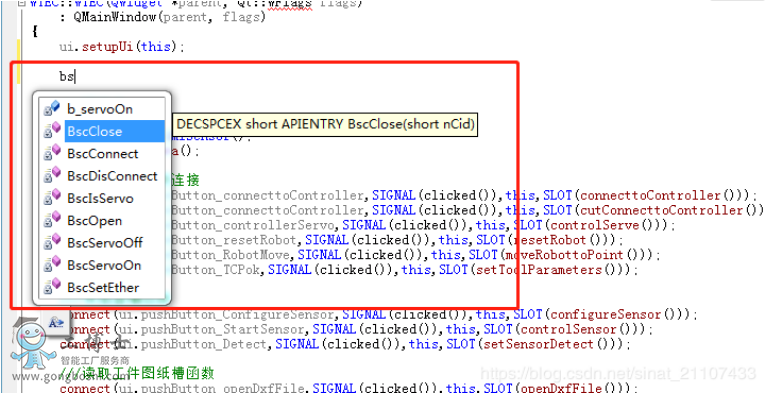
2. 简单测试
接下来可以简单测试下。在Jungle的开发中,基本都是设计一个软件界面,通过点击界面上的按钮来控制机器人完成相应的动作。Jungle是在Visio Studio 2008、Qt和Motocom32联合开发环境下设计程序。如下图,Jungle输入bs后自动提示有以下Bsc开头的函数可以调用,这些都是Motocom32自带的函数。用户们可以简单调用几个函数,或者按照在E:\Motocom32\MOTOCOM32DLL\Help文件夹下的英文手册中的实例,开发个简单的demo,如下图。
了解更多可点击咨询:安川机器人服务商
- 下一篇:收藏 | 安川机器人故障维修合集(上)
- 上一篇:YASKAWA机器人实用小技巧